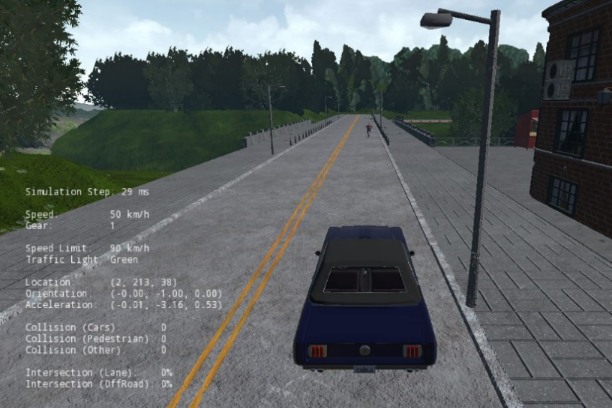
 Model deployed in the CARLA Simulator.
Model deployed in the CARLA Simulator.
- Implemented and deployed an Autonomous Driving model in the CARLA simulator for autonomous driving research.
- Utilized object detection algorithms like the FCDensenet56 & PSPNet models for semantic segmentation of live video of roads.
- Employed Deep Q Learning Networks for Reinforcement Learning based path planning.